Bicycle Speedometer
My first ever international tournament project
Low-cost speed sensing using Hall-effect technology
Theory & Concept
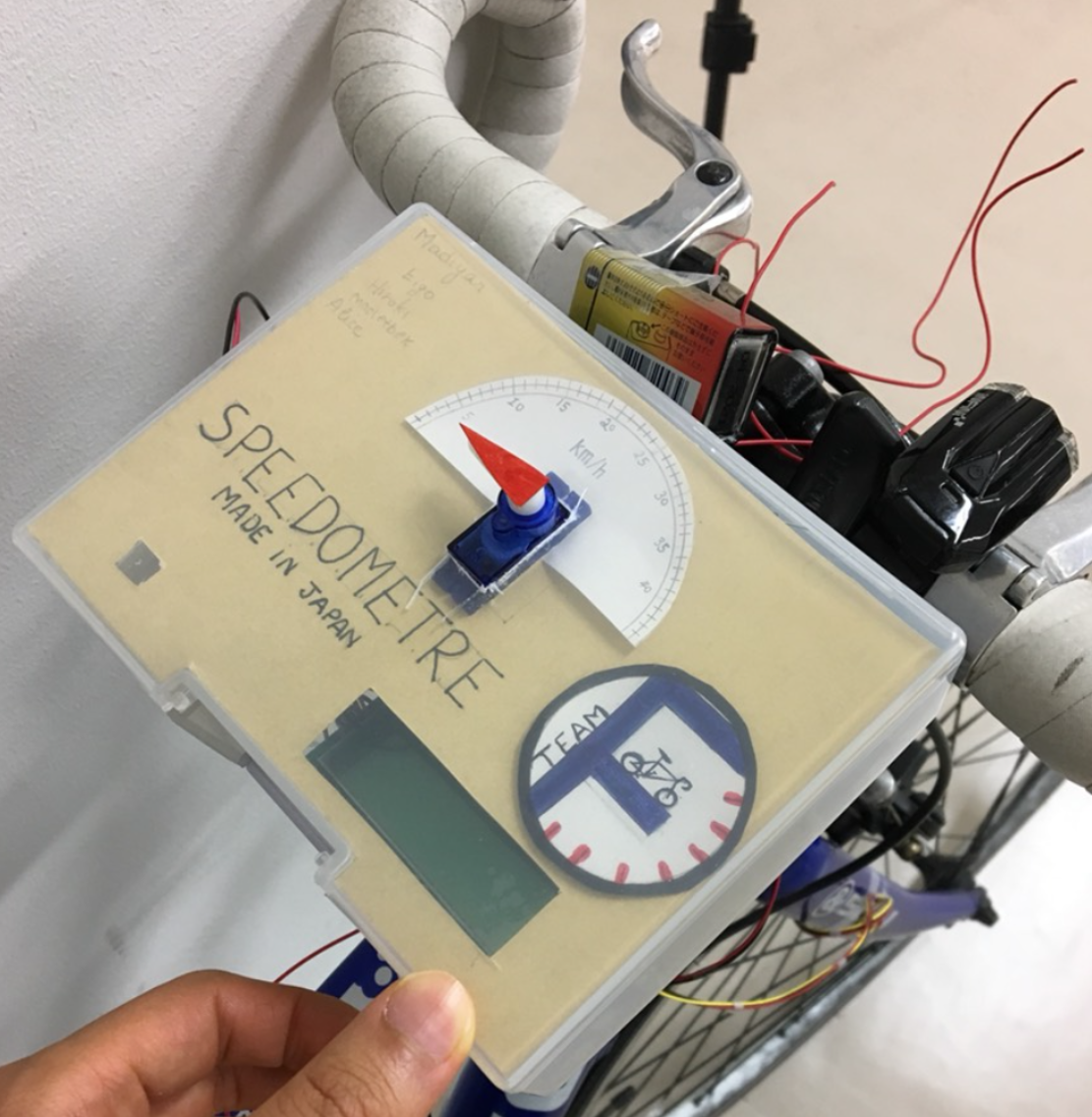
The Bicycle Speedometer project was designed as an affordable and reliable alternative to commercial speedometers, using a simple Hall-effect sensor and magnet system to measure wheel rotations. Inspired by Kyoto’s cycling culture—the prefecture with the highest bicycle usage in Japan due to its flat terrain and iconic destinations—the module calculates both velocity and distance in real time, with an added night mode for evening rides. By translating magnetic pulses into speed and distance, this project makes cycling not just practical but also hackable and fun.
The core principle relies on magnetic field detection: a small magnet attached to a bicycle wheel generates a pulse each time it passes a Hall sensor mounted on the fork. By counting these pulses over time, we can calculate both instantaneous speed and total distance traveled.

Electronics & Hardware
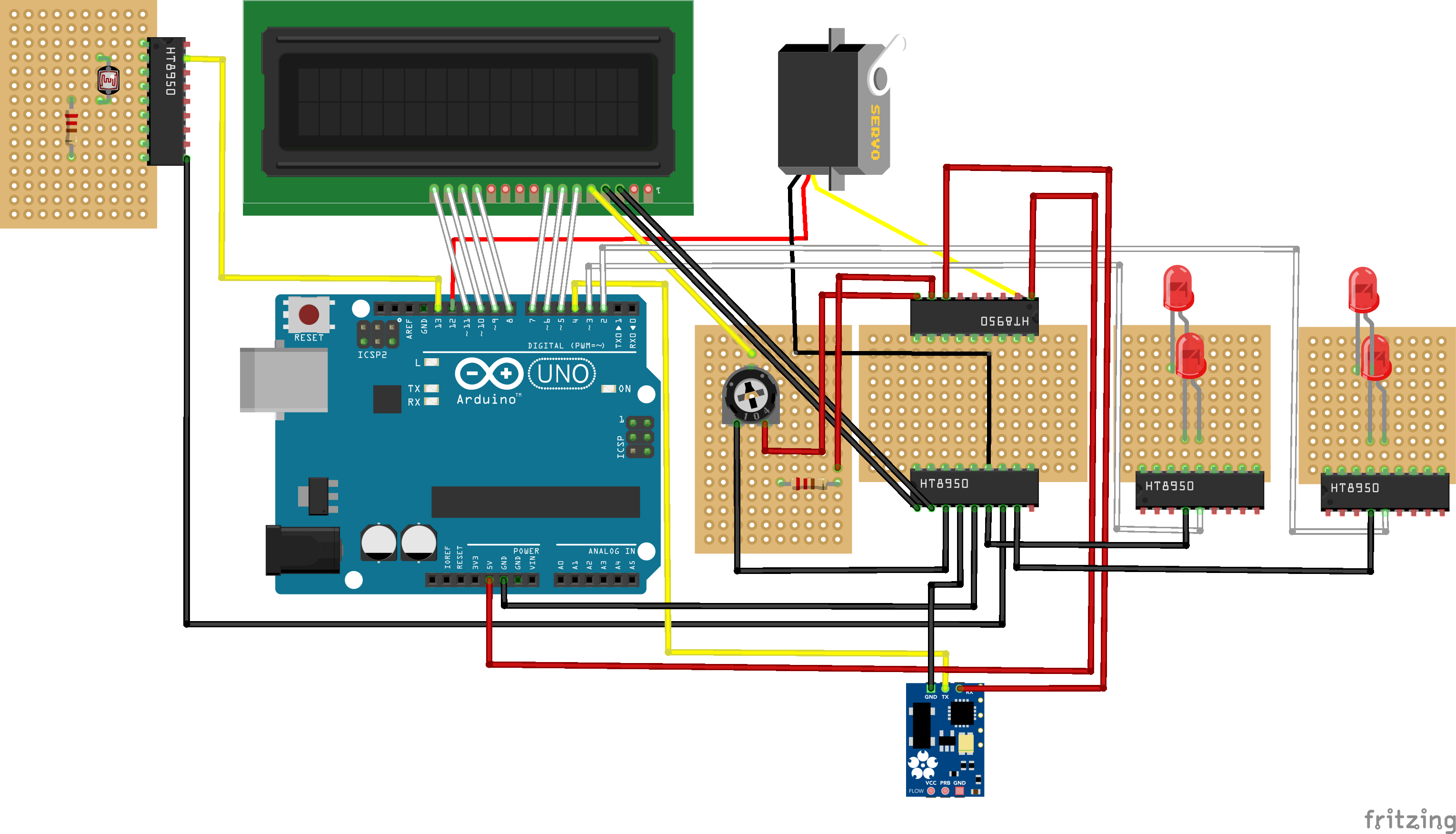
The electronic design focuses on simplicity and reliability. We used an Arduino Nano as the main controller, paired with a digital Hall sensor (A3144) for magnetic field detection. The system includes an I²C LCD display for real-time feedback, a servo motor for analog speed indication, and automatic lighting control based on ambient light conditions.

Results
The project achieved remarkable success, winning the Excellence in Electronics award at the KIT Summer School in Kyoto, 2019. The speedometer demonstrated excellent accuracy and reliability across various testing conditions.

Next Steps & Future Work
While the current implementation successfully meets the project objectives, there are several areas for future improvement and expansion that could make the system even more versatile and user-friendly.
Planned Improvements
- Smart Auto-On via Seat Sensors: Seat-pressure sensors wake the speedometer as soon as the rider sits down.
- DHandlebar Display with Local Analytics: Live speed and ride stats render on a compact handlebar display while an SD card stores raw logs for later analysis/sync
- Toward Assisted/Autonomous Control: GPS/IMU—and later vision—enable lane-keeping and obstacle-aware assistance in controlled tests, progressing toward low-speed autonomy. Safety gates, geofencing, and kill-switches are built in
- Kinetic Energy Harvesting: A micro-dynamo (wheel/hub/chain drive) converts mechanical motion into electrical power to recharge the unit; solar remains a secondary source.
Acknowledgements
This project would not have been possible without the support and guidance of many individuals and organizations who contributed their time, expertise, and resources to make this vision a reality.
Special Thanks
- KIT Summer School: For providing the platform and opportunity to present this work
- Faculty Advisors: Prof. Kazuo Takahashi and Prof. Laifa Boufendi
- Team members: Hiroki Hayashi, Ego Ito, Slamiya Mauletbek, Martinet Alice
Project Repository
The complete project documentation, source code, and hardware designs are available as open-source materials to encourage further development and learning in the electronics and embedded systems community.